сЃѕсЃФсѓ»сѓ╗сЃ│сѓхсЃ╝ сЂ«ТіђУАЊсЂ»сЂЙсЂЎсЂЙсЂЎТѕљуєЪсЂЌсЂдсЂёсЂЙсЂЎсђѓсЂЌсЂІсЂЌт«ЪжџЏсЂФсЂ»сђЂсЂЮсЂ«жќІуЎ║сЂФсЂ» 3 сЂцсЂ«Т«хжџјсЂїсЂѓсѓісЂЙсЂЌсЂЪсђѓ
уггСИђТ«хжџјсЂ»сђЂУеѕТИгТіђУАЊсЂ«ућЪТѕљсЂДсЂЎсђѓ1678 т╣┤сЂФсђЂсЃГсЃљсЃ╝сЃѕ сЃЋсЃЃсѓ»сЂ»сђЂТЮљТќЎсЂ«С╝ИсЂ│сЂежќбжђБсЂЎсѓІТЮљТќЎсЂ«т╝хтіЏсЂесЂ«жќЊсЂ«Т»ћСЙІжќбС┐ѓсЂФжќбсЂЎсѓІсЃЋсЃЃсѓ»сЂ«Т│ЋтЅЄсѓњУфгТўјсЂЌсЂЙсЂЌсЂЪсђѓсЂЋсѓЅсЂФсђЂсЃќсЃфсЃЃсѓИтЏъУи»сЂ«тЄ║уЈЙсЂФсѓѕсѓісђЂжЏ╗тюДсЂ«т░ЈсЂЋсЂфтцЅтїќсѓњТИгт«џсЂДсЂЇсѓІсѓѕсЂєсЂФсЂфсѓісЂЙсЂЌсЂЪсђѓ
уггС║їТ«хжџјсЂ» тЏъУ╗бт╝ЈсЃѕсЃФсѓ»сѓ╗сЃ│сѓхсЃ╝ сЂ«УфЋућЪсЂДсЂЎсђѓ1945т╣┤сЂФсЂ»тЏъУ╗бт╝ЈсЃѕсЃФсѓ»сѓ╗сЃ│сѓхсЃ╝сЂїуЎ║тБ▓сЂЋсѓїсЂЙсЂЌсЂЪсђѓУ▓аУЇисЂЋсѓїсЂЪсѓисЃБсЃЋсЃѕсЂ«У╗ИсЃѕсЃФсѓ»сЂїУДњт║дсЂДсЂГсЂўсѓїсѓІсЂесђЂсЃѕсЃФсѓ»сЂ»Т»ћСЙІсЂЌсЂдтцЅтїќсЂЌсЂЙсЂЎсђѓсЂЊсЂ«сЂГсЂўсѓїсЂ«УДњт║дсЂ»сђЂТИгт«џсѓисѓ╣сЃєсЃасѓњСй┐ућесЂЌсЂдТИгт«џсЂДсЂЇсЂЙсЂЎсђѓ
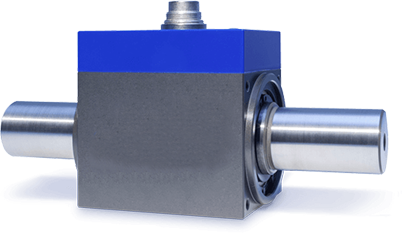
уггСИЅТ«хжџјсЂ»сђЂуЈЙС╗БсЂ«сЃѕсЃФсѓ»сѓ╗сЃ│сѓхсЃ╝сЂ«УфЋућЪсЂДсЂЎсђѓТюђТќ░сЂ«сЃѕсЃФсѓ» сѓ╗сЃ│сѓхсЃ╝сЂ»жђџтИИсђЂсѓбсЃісЃГсѓ░тЄ║тіЏсѓњтѓЎсЂѕсЂдсЂісѓісђЂсЂЊсѓїсѓЅсЂ«сѓцсЃ│сѓ┐сЃ╝сЃЋсѓДсѓцсѓ╣сЂДсЂ»сђЂжџБТјЦсЂЎсѓІсЃЅсЃЕсѓцсЃљсЃ╝сЂїт╣▓ТИЅсЂЎсѓІтЈ»УЃйТђДсЂїсЂѓсѓісЂЙсЂЎсђѓсЂЮсЂ«тЙїсђЂсЃЄсѓИсѓ┐сЃФжЏ╗тГљсѓ╗сЃ│сѓхсЃ╝сЂ«тЄ║уЈЙсЂФсѓѕсѓісђЂт╣▓ТИЅжў▓ТГбТЕЪУЃйсЂїт╝итїќсЂЋсѓїсЂЙсЂЌсЂЪсђѓ

сЂЊсѓїсЂЙсЂДсЂ«сЂесЂЊсѓЇсђЂсѓѕсѓітцџТДўсЂДжФўТђДУЃйсЂфсЃѕсЃФсѓ» сѓ╗сЃ│сѓхсЃ╝сЂїТђЦжђЪсЂФжќІуЎ║сЂЋсѓїсЂдсЂёсЂЙсЂЎсђѓжЮЎуџёсЃєсѓ╣сЃѕсЂІсѓЅтІЋуџёсѓфсЃ│сЃЕсѓцсЃ│ТцютЄ║сЂЙсЂДсЂ«сЃєсѓ╣сЃѕ сѓисѓ╣сЃєсЃасѓѓсђЂт░ЈтъІтїќсђЂсЃЄсѓИсѓ┐сЃФтїќсђЂсѓцсЃ│сЃєсЃфсѓИсѓДсЃ│сѓ╣сђЂС╗«ТЃ│тїќсђЂсЂісѓѕсЂ│сЃЇсЃЃсЃѕсЃ»сЃ╝сѓ»Тќ╣тљЉсЂФтљЉсЂЉсЂдуЎ║т▒ЋсЂЌсЂдсЂёсЂЙсЂЎсђѓ
Jinhui business center, No. 667, Yixian Road, Baohe District, Hefei City, Anhui Province, China